
研究紹介詳細表示
~あなたの身体運動でヒューマノイドロボットを自在に操縦できます~
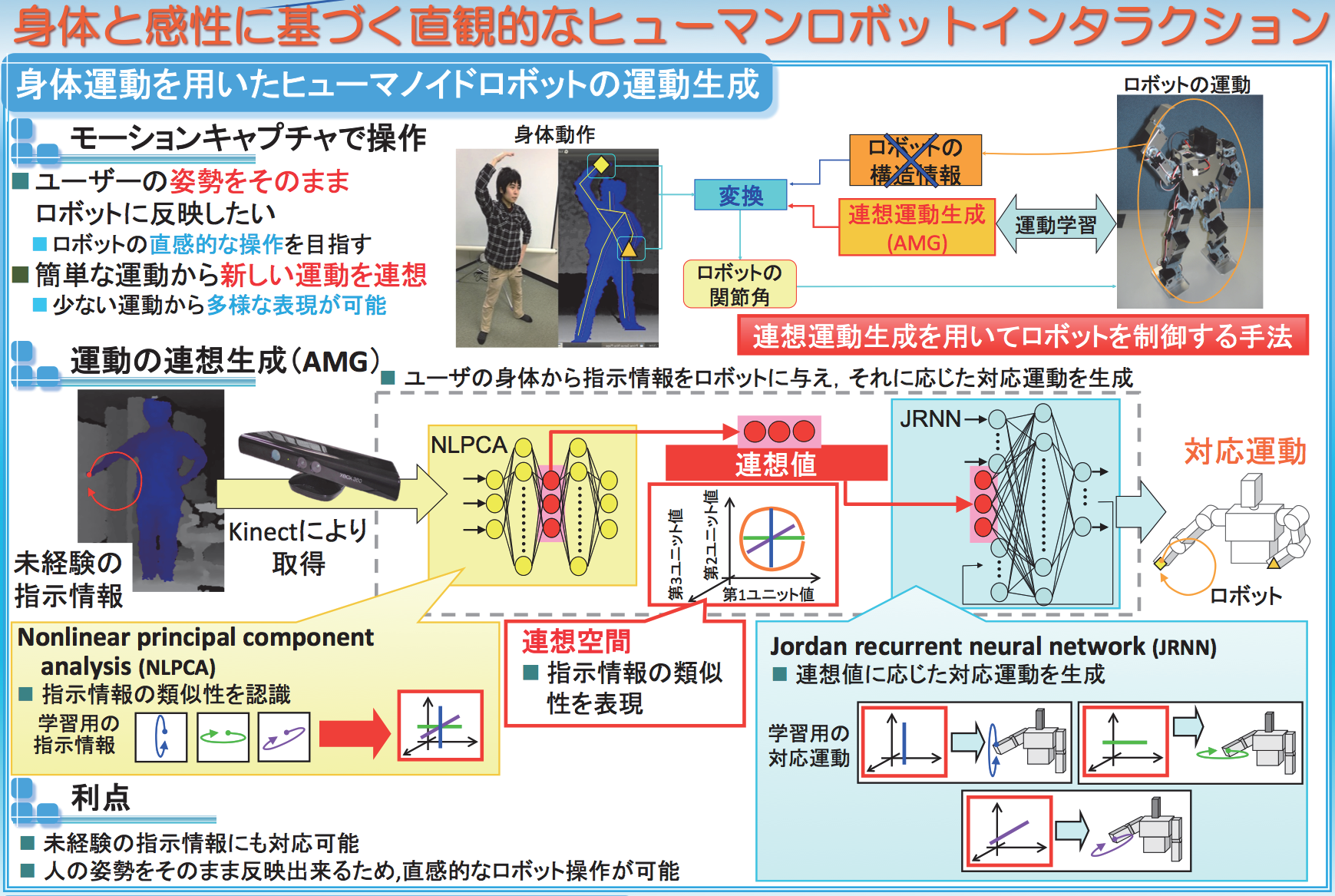
身体と完成に基づく直観的なヒューマンロボットインタラクション
| 研究分野分類:1206 知能ロボティクス 産業分類:その他の製造業,情報サービス業 |
| キーワード:感性ロボティクス,ヒューマノイドロボット,モーションコントロール,テレロボティクス |
| 情報学 |
| 人間情報学 |
| 加藤昇平(情報工学専攻) |
| 研究概要 この技術を用いれば人型ロボットをとても簡単かつ直感的に操縦できます。ユーザーは操縦桿も特別なモーション制御知識も技術も一切不要です。自分の身体を使って姿勢を取るだけで、ロボットがそのとおりの姿勢に動きます。 |
特徴 ティーチング・プレイバック方式でもインバース・キネマティックでもありません。運動の連想生成(AMG)と呼ばれる、新しい運動学習と制御の手法を開発しました。指示情報と既獲得運動の類似性を認識し、連想値に対応した運動を生成する2 つのニューラルネットワークから構成されています。これにmicrosoftKinect センサーデバイスとロボットコントローラーのインターフェイスをそれぞれ独自開発することで、ユーザーの姿勢をリアルタイムにそのまま反映した直感的なロボット操作を実現しました。 |
| 実用化イメージ このシステムにカメラとインターネット通信を接続することでロボットの遠隔操作が可能となるため、例えば、人間の立入りが制限されるエリアでの人型ロボットを用いた遠隔作業に実用出来ます。また、人間同士の遠隔コミュニケーションのメディエーターや、高齢者の運動啓発・リハビリ支援など、サービスロボットの開発も考えられます。 |
|
企業等への提案
研究者からのメッセージ
ICT やスマートデバイス・センサネットワークの要素技術が発達・普及した今、サービスロボット開発の機が熟しています。
文献・特許
・Akinori Wakabayashi, Satona Motomura, Shohei Kato, Associative Motion Generation for Humanoid RobotReflecting Human Body Movement, International journal of fuzzy logic and intelligent systems, Vol.12,No.2, pp.121-130, 2012
・Akinori Wakabayashi, Satona Motomura,Shohei Kato, Body Movement Control System for Humanoid Robot Based on Associative Motion Generation, 12th International Symposium on Advanced Intelligent Systems, pp.192-195, 2011 (Best Presentation Award)
・Yuki Okuzawa, Shohei Kato, et al., Imitative Motion Generation for Humanoid Robots based on the Motion Knowledge Learning and Reuse, IEEE International Conference on Systems, Man, and Cybernetics, pp.4131-4136, 2009
| 試作品状況 | 無し | 掲示可 | 提供可 |
| 利用可能な設備・装置 ヒューマノイドロボットNAO フルボディモーションキャプチャシステム Opti Track Microsoft Kinectセンサと独自開発SDK ポータブル f NIRS Association Motion Generation with Kinectのアルゴリズムとプログラム |
共同研究を希望するテーマ 遠隔操作ロボットの開発・実証実験 サービスロボットのコンテンツ開発 |
| 研究者データベースとのリンク(名前をクリックしてください) 研究者名:加藤昇平 |
| PDF表示と印刷 |


