
研究紹介詳細表示
~小型で安価な万能飛行ロボット、なたならどう使う?~
地上・水上走行と自動充電ができる4ローターヘリコプタの開発
| 研究分野分類:5606 制御・システム工学 産業分類:その他の製造業,その他の事業サービス業 |
| キーワード:制御理論,制御システム,ロボティクス,メカトロニクス,モーションコントロール |
| 工学 |
| 電気電子工学 |
| 山田 学(機能工学専攻) |
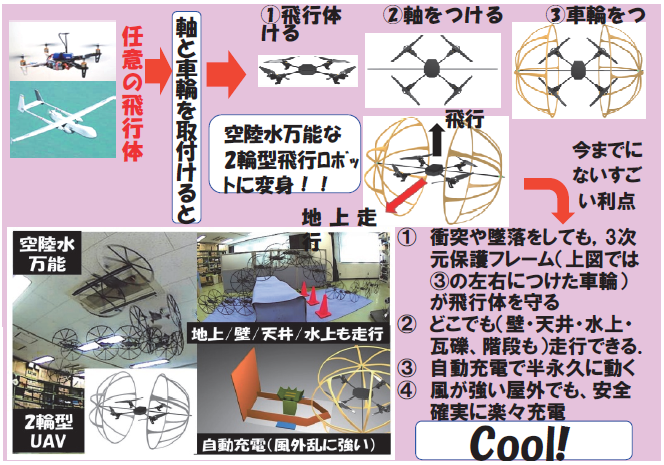
| 研究概要 既存の飛行機(4ロータヘリプターなど)の左右に軽量で円形な保護フレームをつけることで、飛行だけでなく、地上や水上、さらに壁や天井やがれきも走行できる新しい空陸水万能な2輪型飛行ロボットを開発しました。狭く障害物の多い屋内やがれきの散在する災害地でも、安全かつ確実に作業でき、長時間の観測・監視作業を可能にします。 |
背景・従来技術 このロボットは、障害物への衝突や飛行中の墜落があっても、保護フレームにより機体が保護され安全性が高いだけでなく、地上・水上走行時には、保護フレームが左右の車輪の役割を果たすため、走行中や停止時も安定で、方向転換も自由自在です。地上の転がりを利用して、風が強い屋外でも安全かつ確実に充電できる自動充電装置も開発しました。 |
|
| 特徴 ・空中飛行中、墜落や衝突しても壊れず安全。 ・地上走行時は水上・階段・天井・壁等も走行できる万能型。 ・風が強い屋外でも安全・確実な自動充電でき、半永久的に使えます。 |
実用化イメージ ・留守時などの自宅やビルの監視・防犯の無人セキュリティロボット ・トンネルや橋の老朽化検査の無人ロボット ・災害地や人がいけない場所での空撮や検査のための無人ロボット |
企業等への提案
研究者からのメッセージ
手持ちの小型飛行機にこの発明を付けるだけで、小型で安価で一日中使えて、いつでも・どこでも・なににでも利用できる空陸水万能な2 輪型飛行ロボットに変身します。あなたならどうお使になりますか?
文献・特許
・特願2013-032944,『全方位走行可能な陸空両用の移動体』
・特願2013-236548,『陸上および水上走行可能なプロテクトフレーム付き飛行体』
・特願2014-008191,『陸上(および可能な場合は水上を)走行可能なプロテクトフレーム付き飛行体および自動充電装置』
・特願2014-166767,『飛行体本体が車軸および車軸に直交するロール軸周りに回転できる陸上走行可能な飛行体』
| 試作品状況 | 無し | 掲示可 | 提供可 |
| 共同研究を希望するテーマ ・見守りシステム |
| 研究者データベースとのリンク(名前をクリックしてください) 研究者名:山田 学 |
| PDF表示と印刷 |


