
研究紹介詳細表示
~人の知覚を利用した遠隔習字~
遠隔習字システムにおける人の知覚を考慮した制御
| 研究分野分類:5604 通信・ネットワーク工学 産業分類:情報サービス業,インターネット付随サービス業 |
| キーワード:反力の適応制御,サービス品質,ネットワーク,マルチメディア |
| 工学 |
| 電気電子工学 |
| 石橋 豊(創成シミュレーション工学専攻) |
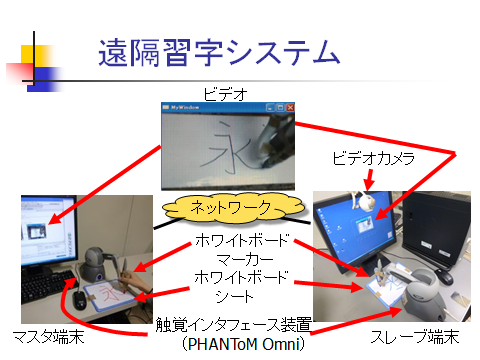
| 研究概要 遠隔習字システムでは、インターネットを介してユーザはビデオの映像を見ながら触覚インタフェース装置を用いることで、反力を感じながら遠隔地にある別の触覚インタフェース装置を遠隔制御して文字を書くことができます。このようなシステムに対して、人の知覚特性を考慮した制御を行います。 |
特徴 反力の適応制御に人の知覚特性を考慮することで、ユーザーが感じる主観的な品質を更に改善します。 ネットワーク遅延が大きく変化した場合に、人の知覚がどのように変化するかを予測し、その知覚に合わせて利用者に提示する反力の大きさを変更することで、精度の高い遠隔制御を実現します。 |
|
| 背景・従来技術 ネットワークを介して触覚インタフェース装置を使用する場合、ネットワーク遅延などによりユーザが感じる主観的な品質が大きく劣化します。これは、ネットワーク遅延が増加するほど、利用者に提示される反力が大きくなることが原因です。 そこで、これを避けるための制御として、反力計算に用いられる弾性係数をネットワーク遅延に応じて動的に変更する反力の適応制御の提案をしています。 |
実用化イメージ 遠隔習字や、遠隔手術などの遠隔制御システムへの適用が可能です。 |
企業等への提案
研究者からのメッセージ
人が操作するシステムの制御を行う上で、人が力をどのように知覚しているかを知ることは非常に重要です。人の知覚を考慮したシステムを実現することで作業の精度及び効率の向上は確かなものだと考えられます。
文献・特許
・K. Matsunaga, Y. Ishibashi, N. Fukushima, and S. Sugawara, “Effect of adaptive reaction force control in remote control system with haptic media and video,” in Proc. The 27th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC),July 2012.
| 試作品状況 | 無し | 掲示可 | 提供可 |
| 利用可能な設備・装置 触覚インタフェース装置 |
共同研究を希望するテーマ 人の知覚を考慮した遠隔制御システム |
| 研究者データベースとのリンク(名前をクリックしてください) 研究者名:石橋 豊 |
| PDF表示と印刷 |


